|
I am a Ph.D. student at Rutgers Robot Learning Lab of Rutgers University (joined in Fall 2022). My advisor is Prof. Abdeslam Boularias. Before that, I received my M.S. in Computer Science from University of California, San Diego (UCSD) in 2021 and B.Eng. in Electronic Information Engineering from The Chinese University of Hong Kong, Shenzhen (CUHKSZ) in 2019. I have been fortunate enough to work with Nikolay Atanasov, Manmohan Chandraker, Henrik Christensen, and Xiaoguang Han on reinforcement learning, auto-calibration, and computer vision. Email / CV / Google Scholar / LinkedIn / Github |
|
|
My research interests lie in robotics and machine learning. I'd like to generalize policy learning algorithms to unseen environments and long-horizon/multi-stage tasks by leveraging expert demonstrations. |
|
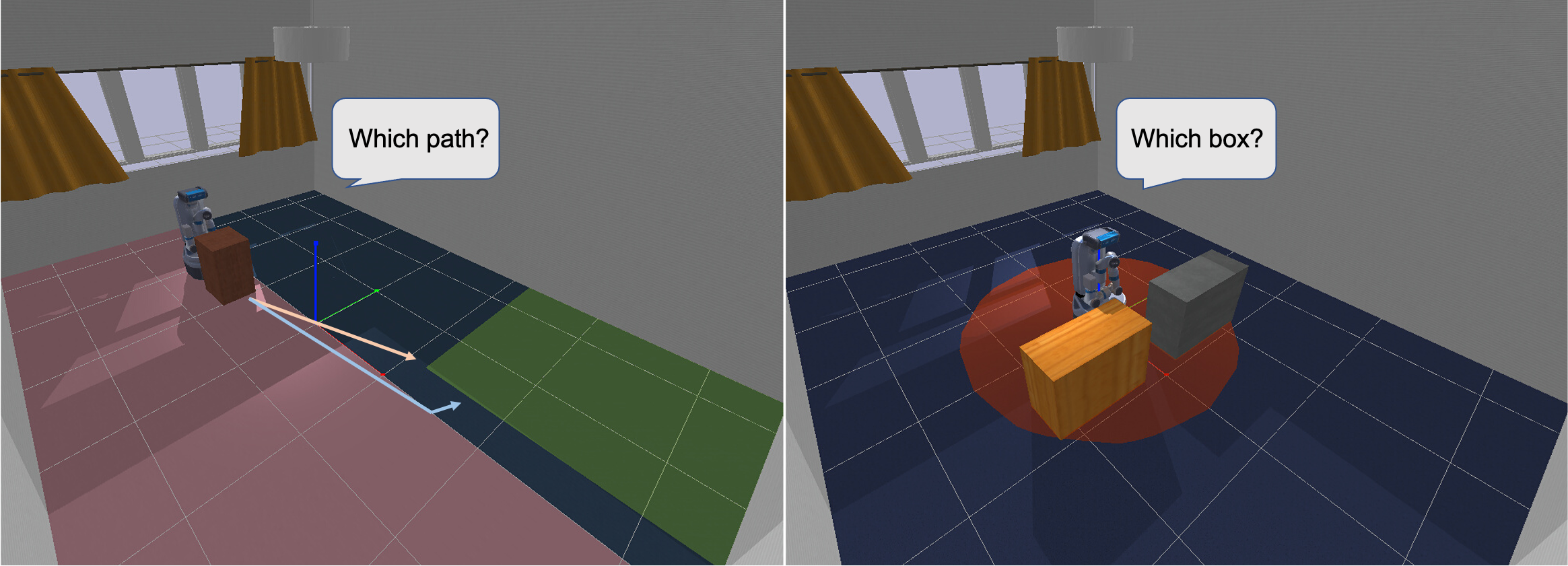
Meng Song, Yuhan Liu, Zhengqin Li, Manmohan Chandraker R:SS Workshop, 2022 video / arXiv Two challenging tasks for testing agent's knowledge of friction and mass, as well as a novel energy-aware reward function to achieve the tasks. |

|
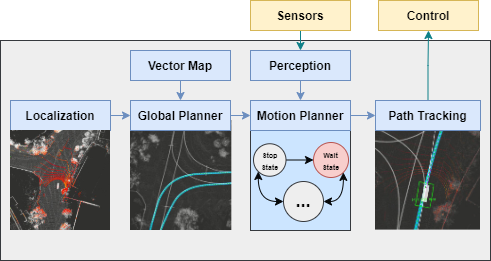
Henrik Christensen, David Paz, Hengyuan Zhang, Dominique Meyer, Hao Xiang, Yunhai Han, Yuhan Liu, Andrew Liang, Zheng Zhong, Shiqi Tang Autonomous Intelligent Systems (AIS), 2021 Springer A thorough documentation of the research effort of design, prototyping, and evaluation of a full stack autonomous vehicle for micro-mobility in UCSD. A valuable overview of a state-of-the-art autonomous driving study. A intriguing guidance for future research directions. |
|
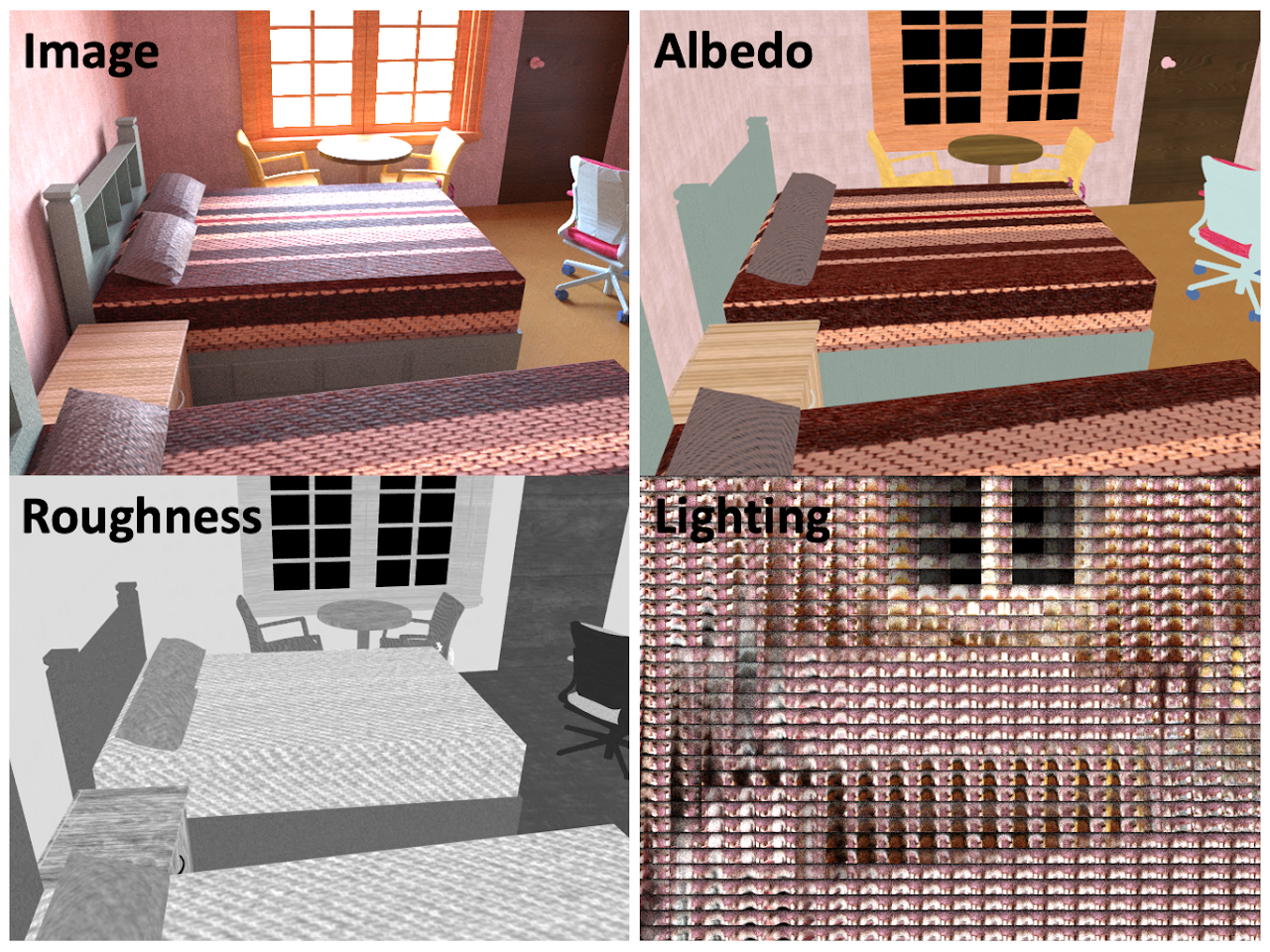
Zhengqin Li, Ting-Wei Yu, Shen Sang, Sarah Wang, Meng Song, Yuhan Liu, Yu-Ying Yeh, Rui Zhu, Nitesh Gundavarapu, Jia Shi, Sai Bi, Zexiang Xu, Hong-Xing Yu, Kalyan Sunkavalli, Miloš Hašan, Ravi Ramamoorthi, Manmohan Chandraker CVPR, 2021 (Oral) project page / arXiv A photorealistic indoor scene datasets with high-quality ground truth SVBRDF and spatially-varying lighting, which can be easily applied to training embodied AI for learning physical properties like mass, friction, and lighting. |
|
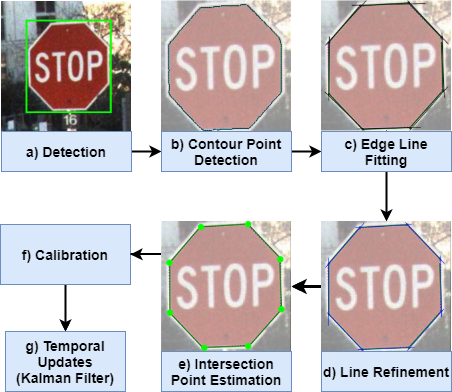
Yuhan Liu*, Yunhai Han*, David Paz, Henrik Christensen ICRA, 2021 project page / arXiv An end-to-end pipeline for continuously updating intrinsic parameters of on-board cameras by recognition of traffic signs. |
|
Modified from Jon Barron. |